
Prêmios e Destaques Acadêmicos
Competições de combate também estimulam aplicação de conhecimento em diferentes áreas, gerando pesquisa de ponta
Foto: Vencedores da Comic-Con na arena com o hardcore Touro Light (divulgação)

 O grande vencedor, Touro Light, após a luta - Foto: divulgação
O grande vencedor, Touro Light, após a luta - Foto: divulgação Com o robô Touro Light, a equipe RioBotz/PUC-Rio, formada por alunos de graduação, conquistou o campeonato brasileiro Ultimate Robot Combat 2017, na primeira Comic-Con Experience, realizada no São Paulo Expo, de 7 a 10 de dezembro. O festival contou com mais de 200 mil participantes e a Riobotz venceu a única categoria do evento, a Lightweight, para robôs de combate até 27kg.
Os combates do URC Comic-Con CCXP 2017 foram todos transmitidos ao vivo pela internet. “É muito gratificante ver que, mesmo na diversão, o aprendizado se confirma e todos saem ganhando. Competições de combate estimulam os alunos a aplicar conhecimentos em Engenharia Mecânica, de Materiais e Elétrica, projetando estruturas robustas com materiais de alto desempenho e sistemas elétricos capazes de suportar até milhares de amperes de corrente observa o coordenador da equipe, professor Marco Antonio Meggiolaro, da Engenharia Mecânica.
Segundo ele, outras competições de que a RioBotz participa, como o sumô robótico autônomo, estimulam também a programação e inteligência computacional. “Combinando o know-how aprendido no laboratório em todas estas áreas com o know-why das salas de aula, os alunos se preparam para desenvolver sistemas robóticos para a indústria, serviço e pesquisa, como veículos autônomos inteligentes”, explica Meggiolaro.
Um exemplo de pesquisa em andamento é a dissertação do mestrado do aluno João Carlos Soares, em que um robô móvel é capaz de mapear e de se localizar em um ambiente desconhecido com o uso de câmeras.
Já as teses dos doutorandos Vivian Medeiros e Diego Rosa visam controlar a estabilidade de robôs móveis em terrenos acidentados, com potencial de promover mais segurança em veículos off-road. Ambos os trabalhos envolvem simulações e desenvolvimento de sistemas experimentais, facilitados pela experiência adquirida em laboratório durante a graduação.
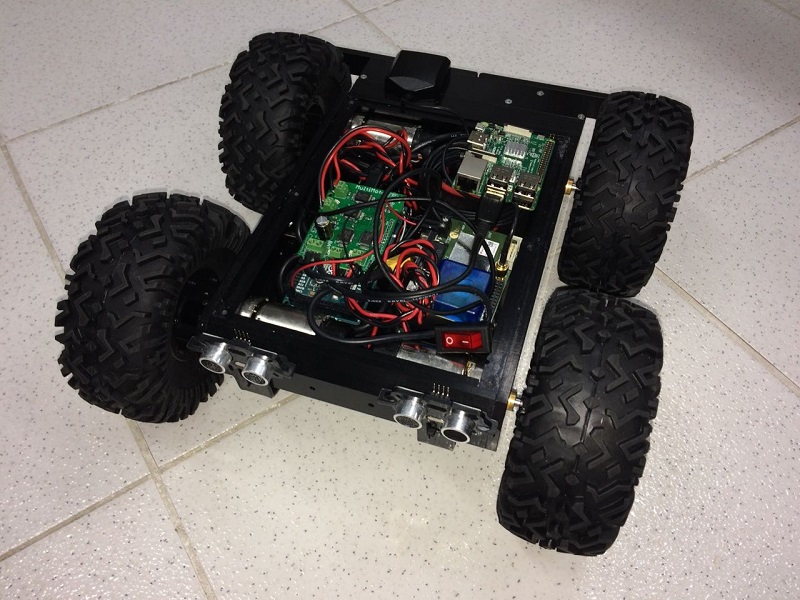 Pesquisa: Rover, um robô móvel autônomo com tração nas quatro rodas para controle de estabilidade - Foto: divulgação
Pesquisa: Rover, um robô móvel autônomo com tração nas quatro rodas para controle de estabilidade - Foto: divulgação